
実世界の困難作業自動化を目指したロボット基盤モデルの研究開発を本格始動-産総研のロボット・データ・計算資源を活用し産業界との新たな橋渡しを目指す-(産総研)
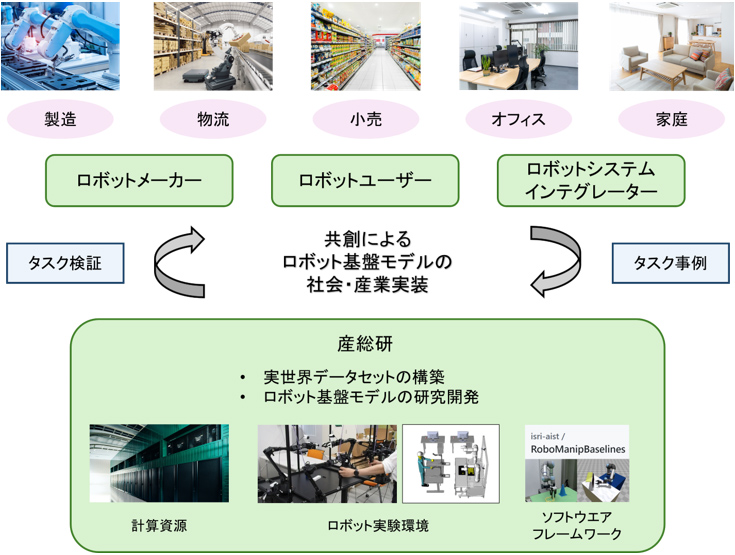
ロボット基盤モデルの社会・産業実装に向けた構想
概要
国立研究開発法人 産業技術総合研究所(以下「産総研」という)は、製造・物流・小売などの産業分野や家庭・オフィスなどのサービス分野でAI・ロボティクス技術により自動化を促進するロボット基盤モデルの研究開発を開始します。ロボット基盤モデルの共創的な社会・産業実装を実現するために、作業自動化に課題を抱えるロボットユーザー、ロボットメーカー、ロボットシステムインテグレーターとの連携を目指します。
研究開発の背景
近年、ロボティクス技術とAI技術の融合によりロボットの汎用性・即応性・柔軟性を格段に向上させる研究が世界的に活発に行われています。少子高齢化による労働人口減少に対応するために社会・産業現場の自動化ニーズは高まっており、実世界における作業自動化のキーデバイスであるロボットはこれまでにも多くの現場に導入されてきました。しかし、柔らかくて変形する物体や透明な物体を扱う作業、多種多様な物体を扱う作業などは、従来のティーチングやプログラミングに基づく運用ではロボットへの作業教示が困難であるという課題がありました。このような課題に対して大量の実世界データから学習されたロボット基盤モデルを開発し、これまで自動化が困難であった複雑な実世界の作業にロボットを導入しようという気運が高まっています。
研究開発の経緯
産総研ではこれまでに、実世界の多種多様な作業に対して汎用的に適用可能なロボット基盤モデルを構築するためのコア技術となる、視覚と力覚の関係を想起するAIモデル、人間の認知発達過程を模した動作基盤学習、実画像データの収集が不要な数式に基づく学習データ生成などの研究成果を公表してきました。
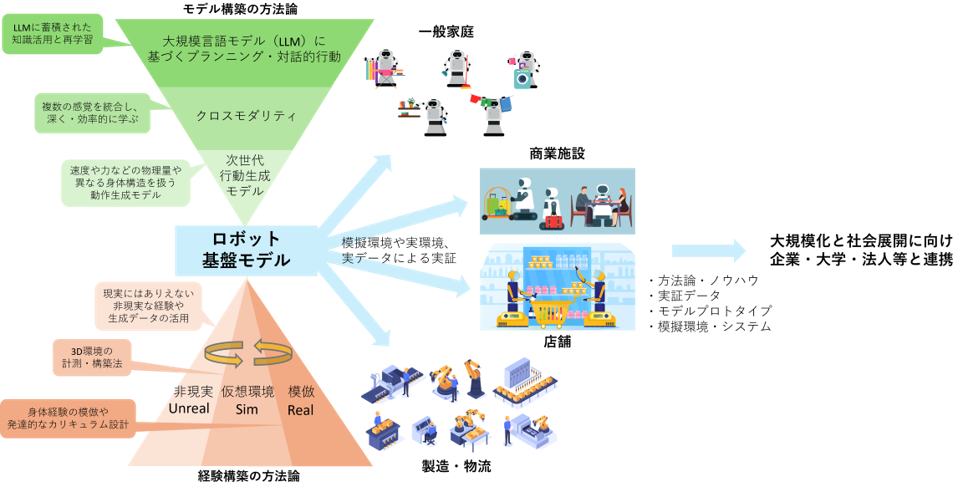
図1 ロボット基盤モデルの研究開発アプローチ
ロボット基盤モデルを構築するための設備の導入・運用も進めており、これまでにAI橋渡しクラウド(ABCI)をはじめとする計算資源やデータ収集に必要となるロボット実験環境を整備してきました。さらに、最先端の模倣学習手法を実世界やシミュレーションのさまざまな環境で再現検証するためのソフトウエアフレームワーク「RoboManipBaselines」を開発し公開しています。これらの設備やソフトウエアを利用し臨海副都心センターに設置した工場やコンビニエンスストアを模した実験環境において、双腕マニピュレータプラットフォームALOHAや産業用ロボットにより、ロボット基盤モデルの構築に欠かせない実世界の作業データを収集しデータセットの構築を進めています。
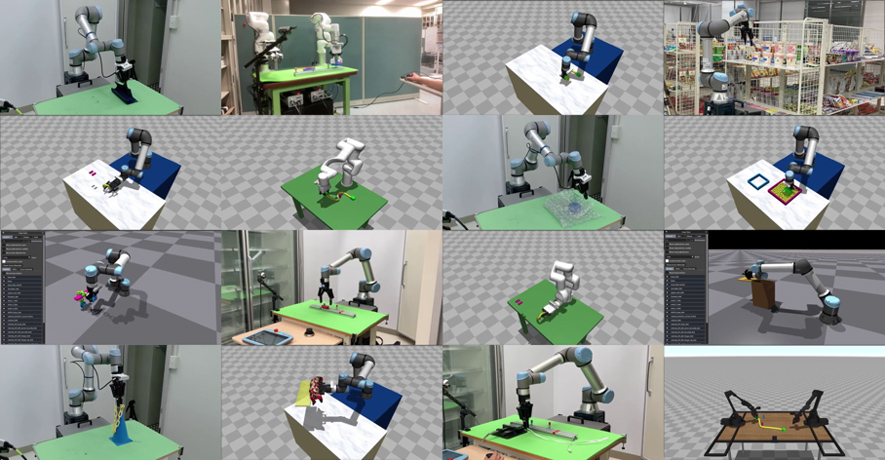
図2 ロボット学習ソフトウエアフレームワーク「RoboManipBaselines」による検証実験事例
研究の内容
産総研ではこれまでに築いたこのような強みを生かし、研究成果の社会実装を推進するという使命のもと、産総研政策予算プロジェクト「フィジカル領域の生成AI基盤モデルに関する研究開発」の一環として、自動化が求められる製造・物流・小売などの産業分野や家庭・オフィスなどのサービス分野の現場で役に立つロボット基盤モデルの開発を目指します。
ロボット基盤モデルを開発するためには大量の計算資源と実現場の大規模なデータが必要であり、ロボットを利用する個々の事業者が単独でそれらを賄うには高い壁があります。産総研は事業者とともにこれまでに整備してきた計算資源、ロボット実験環境、実世界データセットを活用し、各事業者が困難なタスク事例をテストして相互にフィードバックを得ながら共同で研究開発を進める門戸の開かれた体制を構築します。具体的な連携の例としては、事業者と産総研間での技術コンサルティングや共同研究契約の締結、事業者自身がタスク事例テストを実施するために産総研へ技術者を派遣する技術研修制度の利用、事業者から産総研へタスク事例に関する物品や情報の提供など、の形式が想定されます。ロボット基盤モデルの汎用性向上のためには、個々のタスク事例を横断した大規模なデータセットによる学習が効果的であることから、必要に応じて秘匿化などの処理を施したうえで、学習に共通利用可能なタスク事例の提供を歓迎します。
また、産業用ロボットの高い世界シェアを有する日本において、開発されたロボット基盤モデルを、国内メーカー製をはじめとする世界中のさまざまなロボットで運用可能にするインテグレート技術の検証も欠かせません。そのために産総研は、ロボットユーザーのみならずロボットメーカーやロボットシステムインテグレーターと、各社のロボットへのロボット基盤モデルの導入検討やシステムインテグレーションにおけるロボット基盤モデルの活用などにおいて連携することを目指して研究開発を推進します。
今後の予定
本研究開発では、ロボット基盤モデルを中核技術として共創的なアプローチにより社会・産業現場への実装を加速することで、少子高齢化による労働人口減少という課題解決に貢献することを目指します。産総研では、研究開発を通じた社会課題の解決に今後も貢献していきます。
研究開発体制
情報・人間工学領域連携推進室 AIST-CNRSロボット工学連携研究ラボ 室岡 雅樹 主任研究員
人工知能研究センター 中條 亨一 産総研特別研究員
人工知能研究センター 尾形 哲也 特定フェロー
インダストリアルCPS研究センター オートメーション研究チーム 元田 智大 研究員
インダストリアルCPS研究センター オートメーション研究チーム 原田 研介 特定フェロー
インダストリアルCPS研究センター オートメーション研究チーム 堂前 幸康 研究チーム長
最新のEMC関連規格動向は『月刊EMC』にて随時掲載しています。
Copyright(C) Kagakujyoho shuppan Co., Ltd. All rights reserved.
※記事の無断転用を禁じます。
